FAQ System
ADU not grounded
The ADU works with a differential amplifier. This requires that the amplifier has a grund (gnd) as reference. If not the signal is floating (not stable).
An example is shown here:
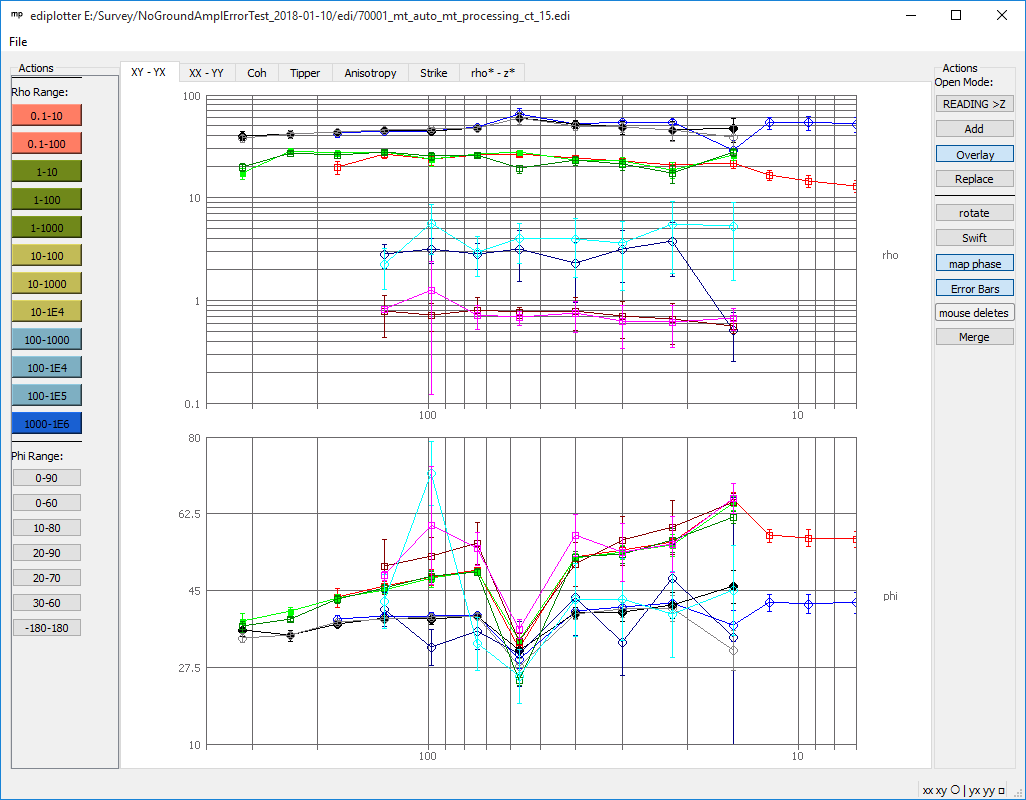
The HF and LF data almost differ by a factor of 10. That looks similar to a wrongly configured input divider switch
Input divider switching
I the input dvider on the connector board divides the signal by 8 when switching from E to H.
In case the settings are wrong, the signal is too high or low.
The signal can be repaired by editing the LSB and divide or multiply the LSB by 8.
This rarely occurs - e.g. a strong lightning nearby can be the reason, where shortly the input exceeds 100V or more.
Laboratory Measurements
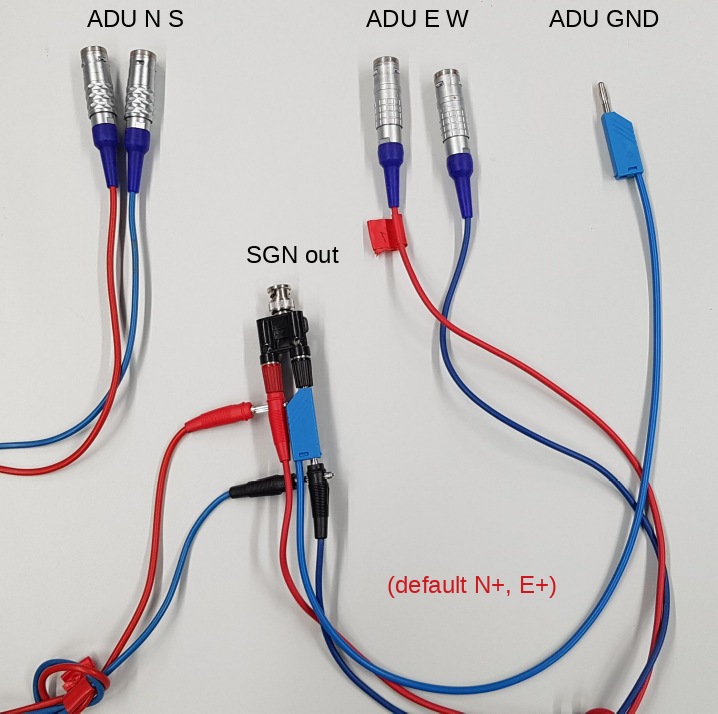
When measure in the laboratory the ADU must be grounded.
If the signal generator has GND - connect here.
If your electric (220/110 V) has ground pin - you also can connect here.
All this does NOT work if the signal generator is battery powererd.
What always works is to connect the MINUS pole of your E-Field to the ground.
To be on the save side your sampling frequency shall be at least 4 times the input signal frequency.
If you use rectangular signals a minimum of 8 to 16 times is recommended.
Use any voltages less then 100 mV for E ( 1000 mV for H) with GAIN_1.
If you want to test the gains you must reduce the input accordingly (25 mV with GAIN_4).
GPS
The position and timing of the ADU is obtained with the GPS The estimated timing precision is 30 ns RMS.
The positioning e.g. around +/- 5 (10) meters. The position error is not equally distributed. In worst examples and NOT beeing in “G4-FIX” mode (= full quality and locked signal) the positioning error is about three to five times higher.
The system switches from G1 (one ore more satellites found, time received over G2 (prepare sync) to G3 (3D position valid, time valid). Ince this is achivied the ADU will sync CPU and BIOS within 120 sec and report finally the G4-Fix.
The measured elevation of all GPS is always poor: 30 meters uncertainty and more is the default. Hence: most of older maps do not use the WGS-84 sea leavel! In Northern Germany we have additional 15 meters difference to the old system.
Full positioning and timing needs equal or more than 4 satellites visible and active.
Example measurement in Braunschweig with the Navsync module (old ADU-07e). The GPS module was place beside the office window and had not full view to the sky:

A) Hence that the so called almanac MUST be reloaded if the position has changed - e.g. after a few 100km. Sometimes less; and after 90 days the almanac becomes invalid
B) It takes up to 13 min until a new almanac is transmitted (hence that your mobile phone can load the almanac from the Internet)
C) Sometime parasitic reflections make you believe to see 12 or more satellites.
D) Some GPS receivers (software) show satellites which they can not see - even if there is no reception. The use the data from the almanac, not from the antenna
The ADU-08e GPS receiver uses GPS and Glonass. Galileo will follow. The position will be fixed quite soon. For beeing on the safe side, especially with the ADU-07 - we recommend to start all systems at the base camp, check, wait for G4 fix. At the field site the login will be faster, even under poor conditions.
Open The Box
(click on the images to enlarge)

remove the top screws
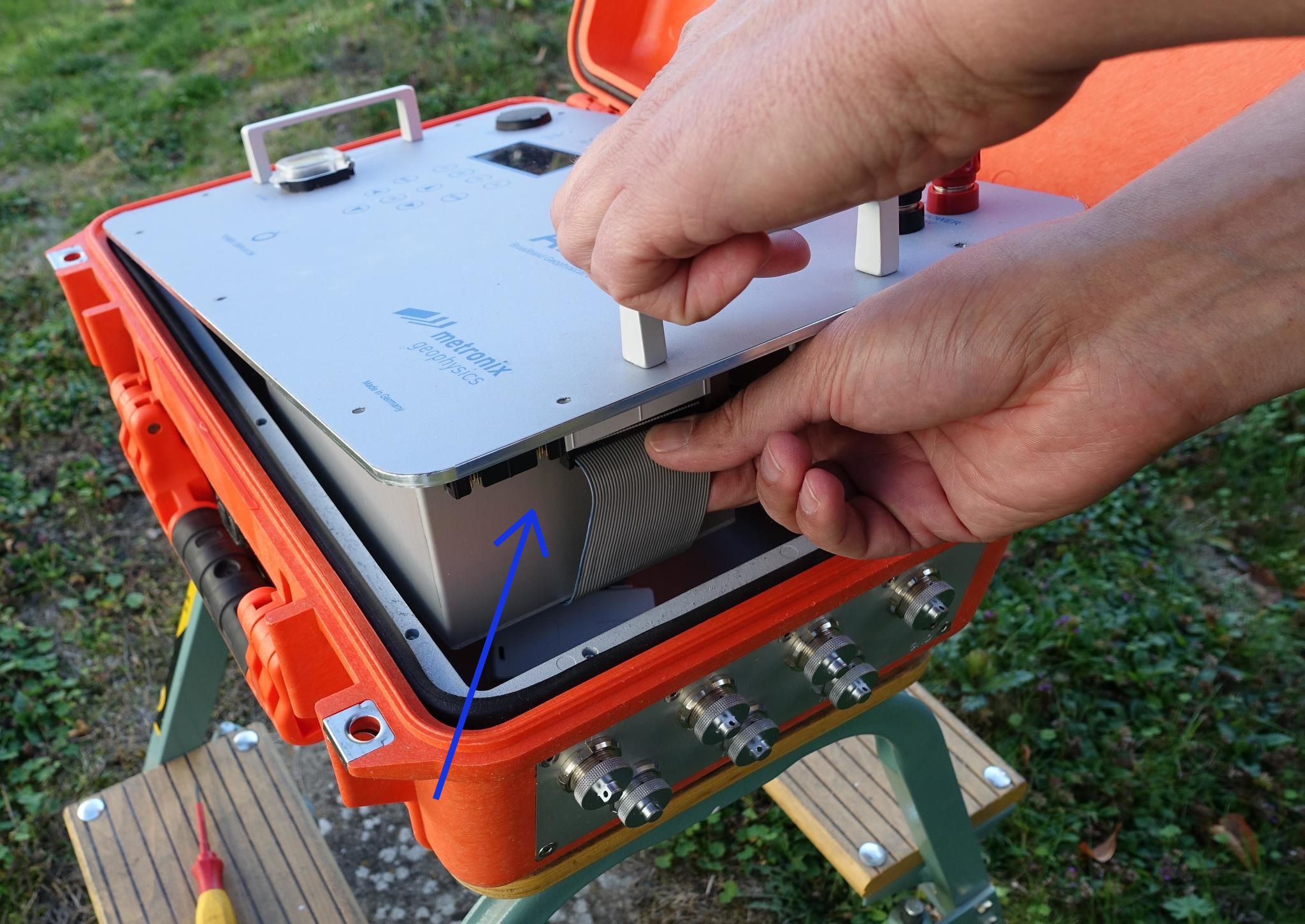
Pull the ribbon cable
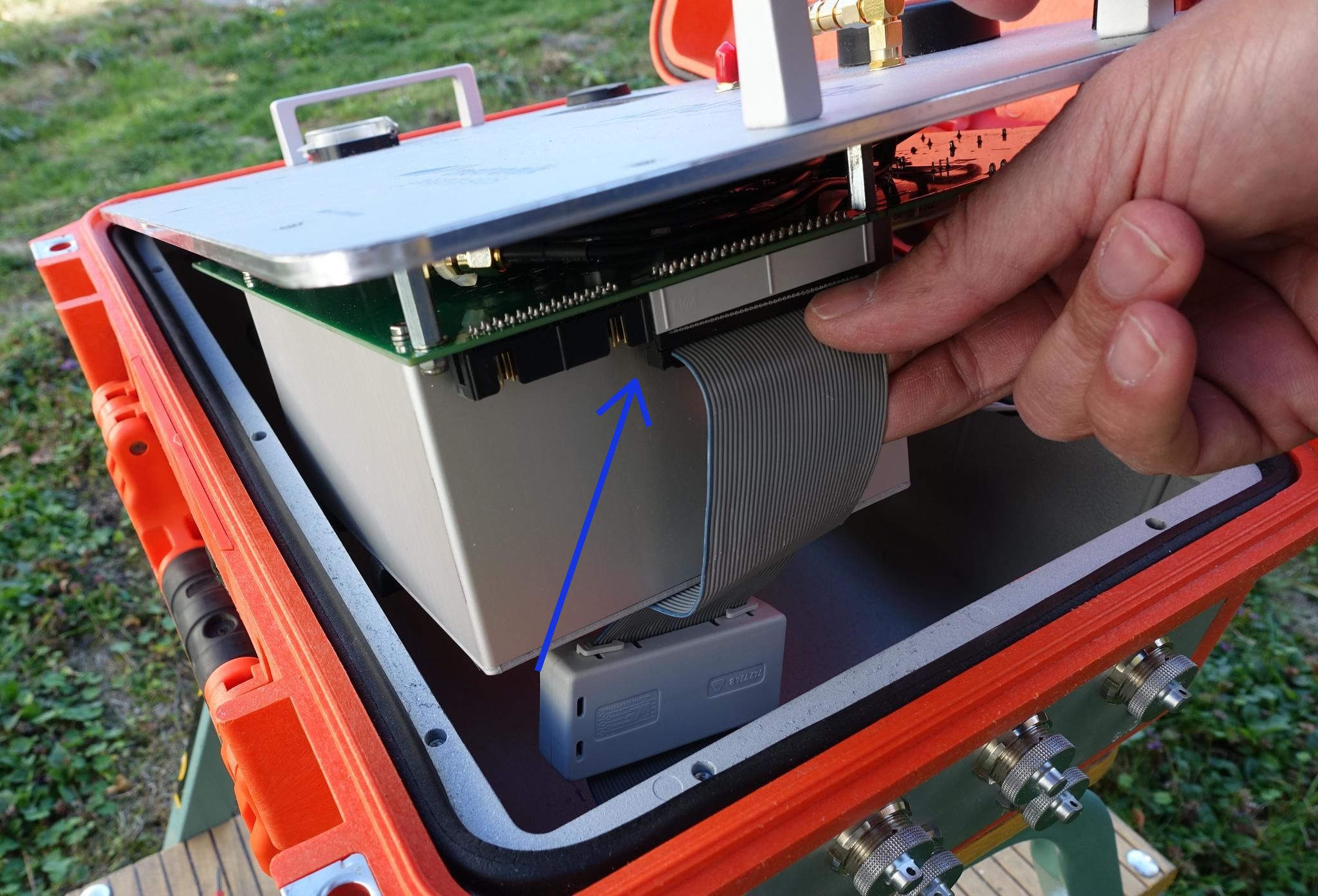
don’t worry, the cable can only be plugged one way
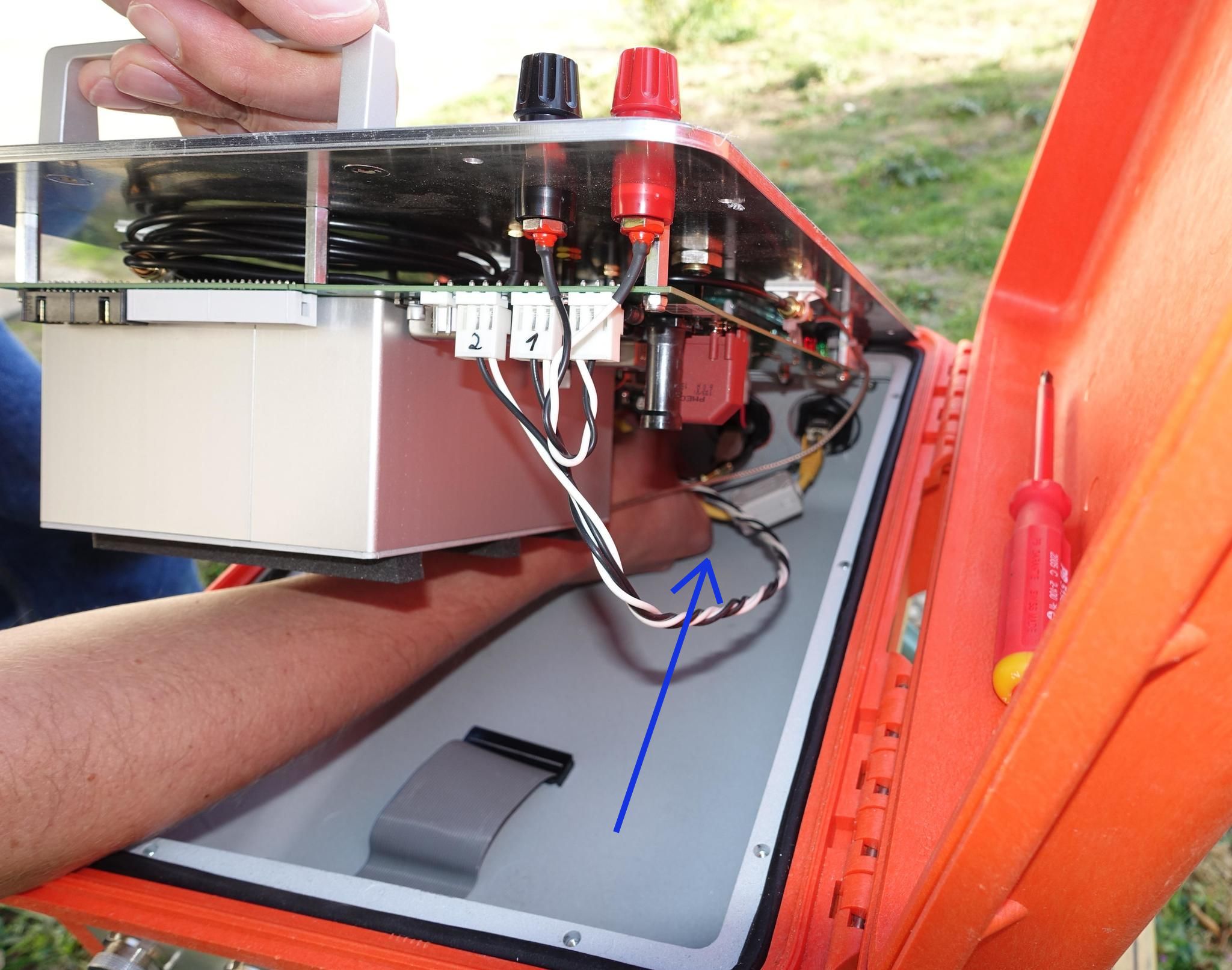
open the box from the right side - that is the most easiest way
and carefully unplug the Ethernet cable, the USB cable and un-twist the GPS antenna cable.
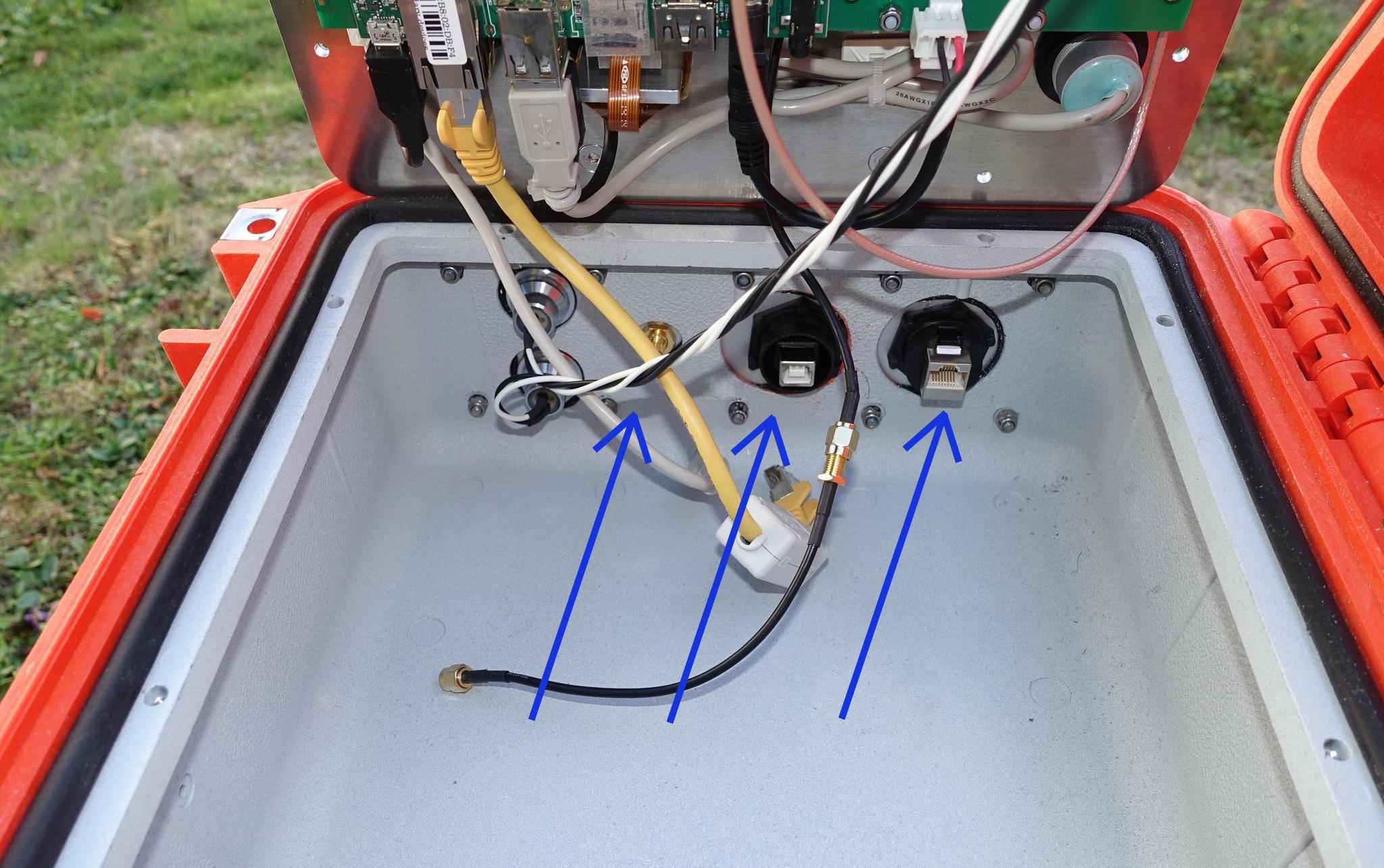
left to right: GPS antenna plug, USB plug, Ethernet plug

CPU board with battery CR1220 (3V, blue arrow) and protection fuse (red arrow)
open the board casing (right) with a screw driver
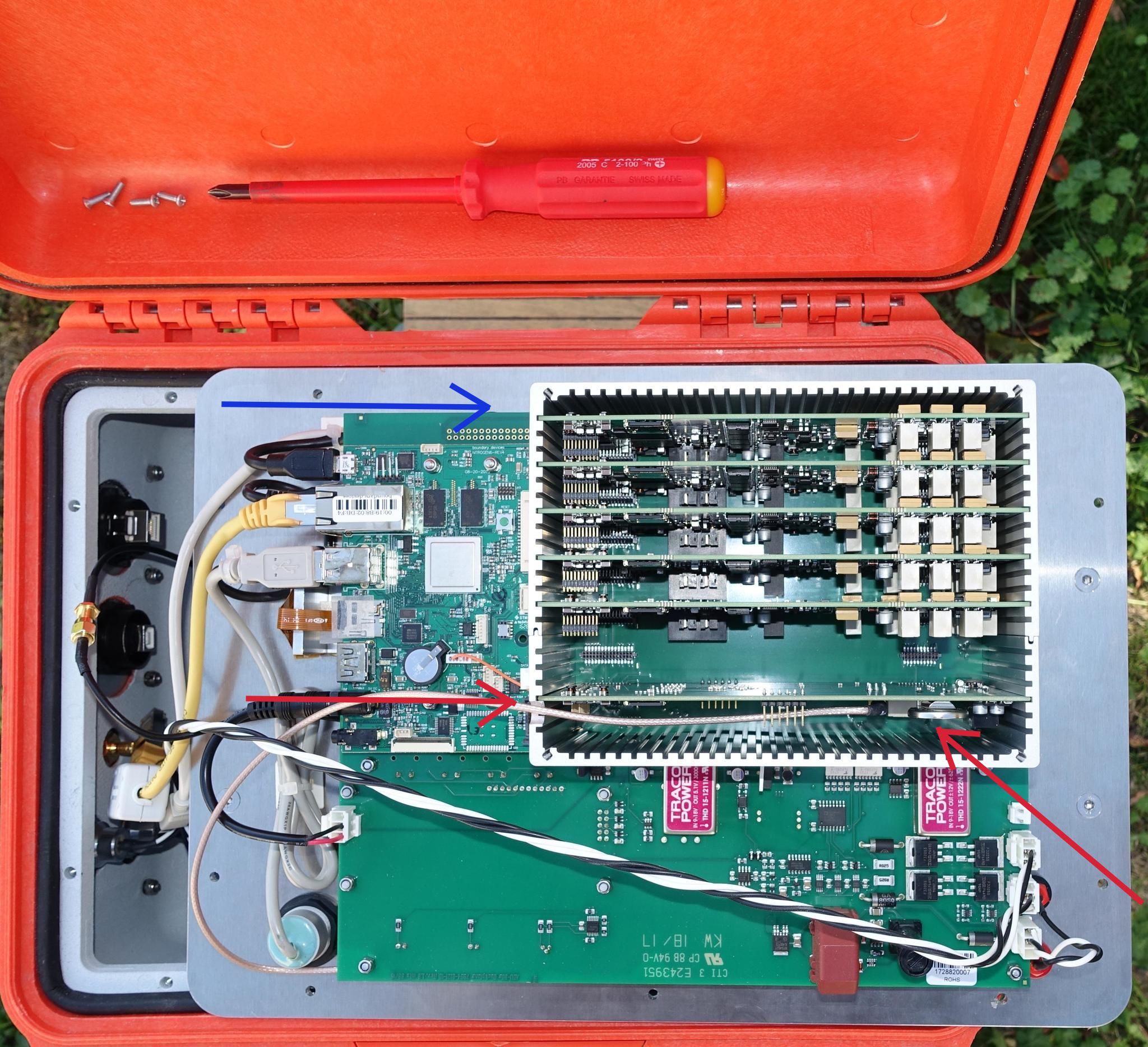
On top there are the ADB boards 0,1,2,3,4 and maybe #5 or multi purpose board; down (red arrow) is the GPS board
with battery CR2032 MFR RH2 3V
take care that when touch the boards, you have to electro-static voltage
Pull the board you want to exchange; unplug the antenna cable in case
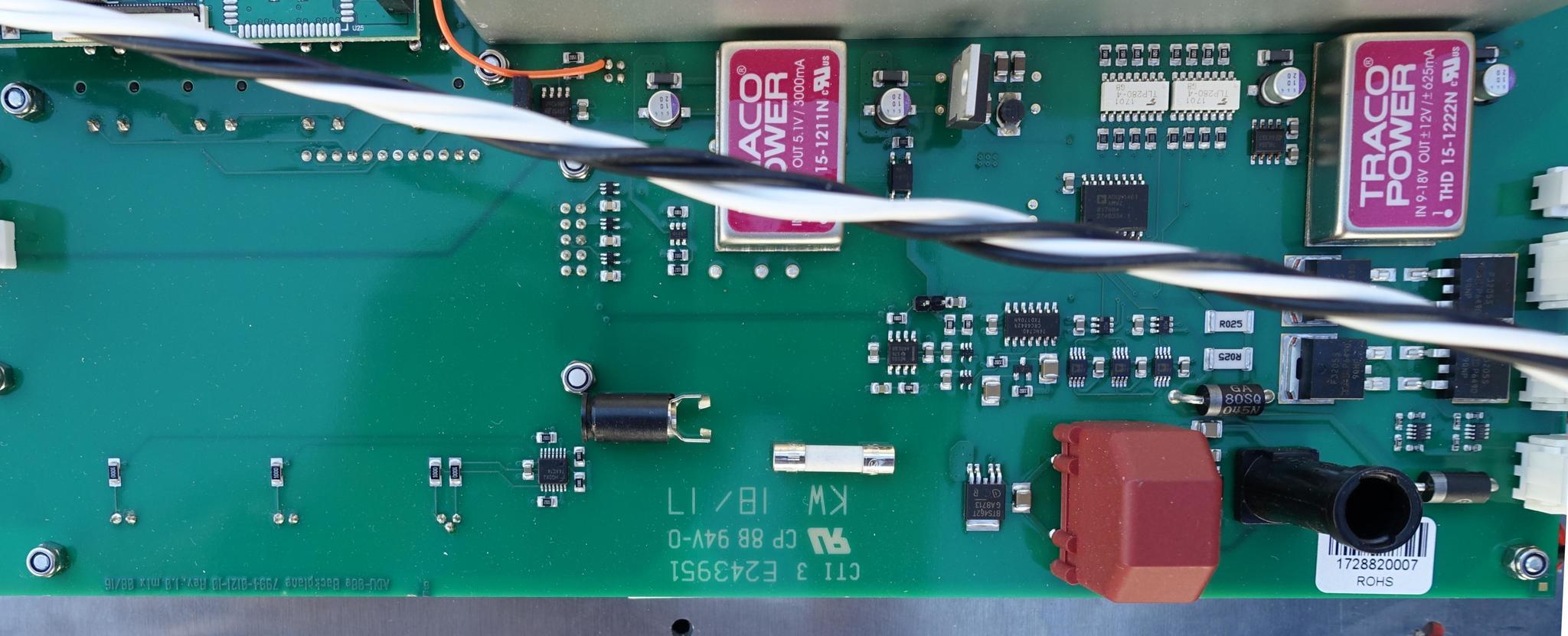
secondary fuse for external batteries
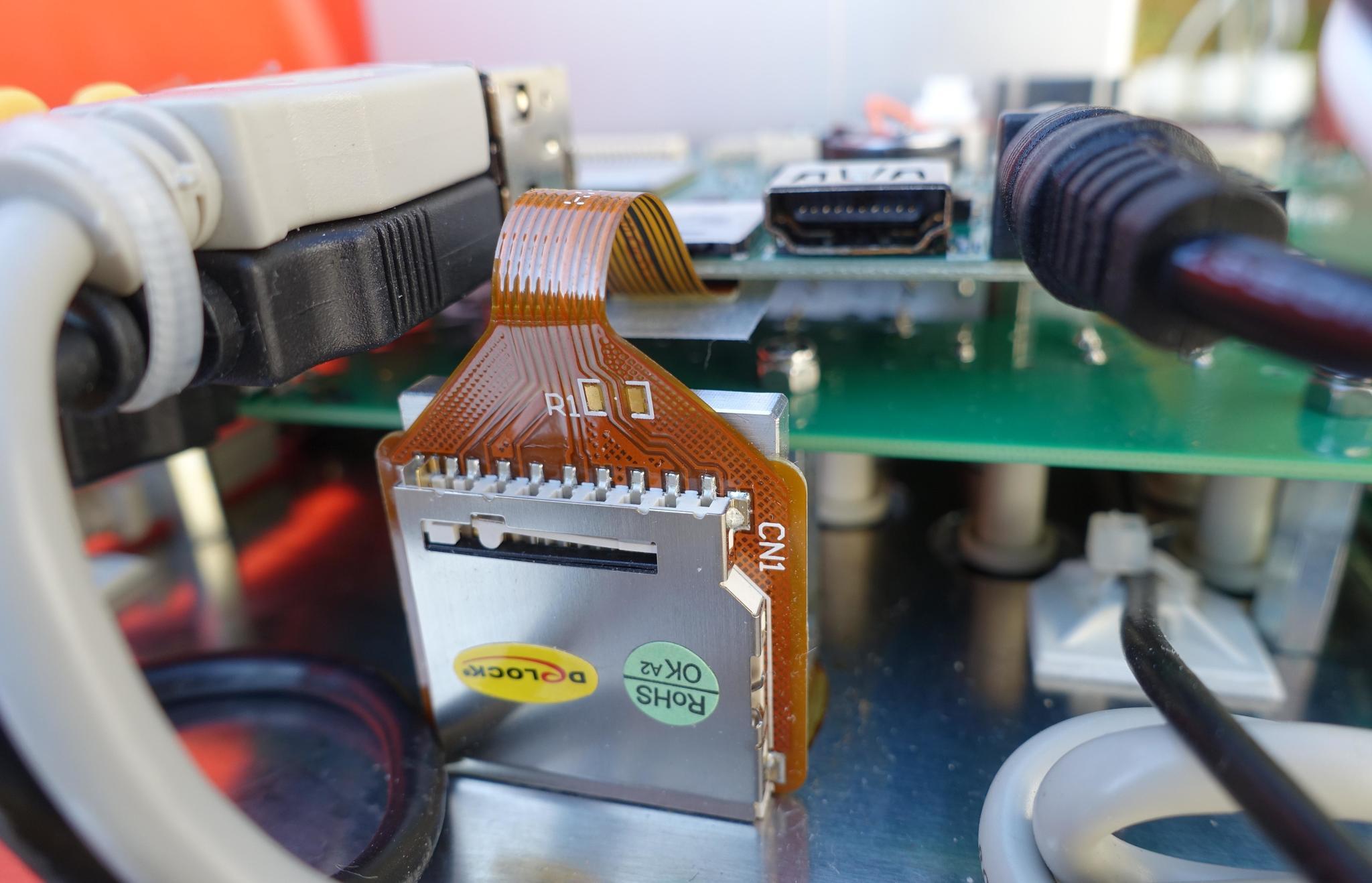
make sure before you close the box that USB (brown cable) and flash card are inside.
the flash card should be fixed with a small piece of tape.
Observatory Measurements
The base station contains the
Internet modem
Synology Disk Station (model with two Ethernet ports)
Ethernet link to the ADU (max. 100m)
ONLY with voltage regulator at the ADU side: power link to the ADU; AC line over 100m is critical
on the Synology
Web Station
PHP 5.6 (not 7.x)
Apache HTTP Server
must be installed.
For data forwarding you can use the Cloud Sync module to transport the data to you headquarter.
The Synology is connected via LAN 1 to the modem and gets an IP address via DHCP
Lan Port 2 is set static; for example 192.168.40.1
Add a routing to you ADU, in case to 192.168.40.37 if this is your ADU
Install the ADU web interface on the Synology
After that you can use the Synology webserver to reach the login page of the ADU; use “User defined target IP” and type for example 192.168.40.37 … and off you go
Lightning Protection
For observatory measurements you have to take extra care of lightning protection.
One the electric line receive more than 1200V the ADU gets toasted.
A direct hit into the line even bursts the electrode. You may try an extra lightning arrester fo the E lines.
Comparing ADU-08 and ADU-07e in Time Domain
For the ADU-08e the smallest NATIVE (directly supported by A/D converter) sampling frequency is 256 Hz.
Sub-bands are created by digital filtering. The ADU-07e goes down native to 128 Hz.
Therefore the timeseries look slightly different. However the spectra are the same when going up to f_sample/4.
256 Hz up to 4 kHz are identical and can be folded in the time domain with ADU-07e data.
Same applies in HF range. ADU-08e natively supports 65536Hz … 524288Hz. The sample frequencies of 32768Hz … 8192Hz are recorded by the use of higher sampling frequencies + digital filter.
Advantages & Benefits of the System
History:
metronix builds MT systems since 11 August 1976.
At these days MT was a pure scientific method; the frequency range needed to investigate the earth’s interior was 1 s to 1000 s.
That was already a range of 10³
For oil & gas and minerals already quite deep - 1 s period may be a depth of 2 km. Today (2020) the world has changed and oil & gas are explored deeper and minerals explored easily to 2 km depth.
As a consequence the sampling frequencies were adjusted to higher frequencies until we reached the magic
4096 Hz in the early 90ties. That corresponds to a range of 10⁶
Today metronix systems cover a frequency range of 10⁹
With starting to use Linux® we opened our software for all users.
The ADU operating system is based on Linux®. It is a free and open source OS
Connecting to the ADU therefor is the same as with connecting to a Linux® server: ssh, sftp and samba. The drives of the ADU can be connected as network drives.
Remote access via Internet can be done easily.
The system supports DHCP and can acquire a global IP address. Otherwise the system uses a local IP address. The system can work as a remote observatory when connected to a modem.
And: you set up your own data server! No “man in the middle” is reading your data.The system is operated via HTML and an integrated web server. No software is needed to operate the instrument. Unattended automatic recording mode can be triggered by the web interface. Also the system can contain pre-configured job lists, which start after booting the instrument.
Time series can be accessed remotely by various apps and downloaded for sure.
The recorded time series are chunk free (un-interrupted / contiguous) at all frequencies. This is a great benefit when deploying your own software. You can load the data into C++/Matlab/Python as a simple vector/stream. Processing with open-source software based on robust algorithms is easy so.
The data format is open source ref: Programmers Notes and can be used without any restrictions.
Open Source modules for your own programming are found here: MTHotel Open Source is important when you interchange data with other institutes. Can you cross check your results? Can a new algorithm be tested? How do you verify your data when the data is inside a black box? Can you make advantage from others progress?
What happens if you decide to extend the lifetime of the software?Institutes like NGRI have adopted the file format for their processing.
USGS has officially the (newer atss) format in their MTH5 storage format.
The meta data such as calibration and log files are provided as simple XML /JSON files.
The time series from the ADU do NOT have a calibration. They are linear up to sampling frequency divided by 4. So only the sensor calibration needs to be applied. For lower frequencies a mathematical function can be applied (the sensors are calibrated on to this function).
The calibration data of the coils is read out by the ADU during the measurement. You ALWAYS have the correct calibration data.
The metronix MFS/SHFT coils and Bartington fluxgates do NOT need a in field re-calibration. Other manufactures request a time consuming re-calibration before starting a measurement.
Yearly fees? Expensive dongles? Software contracts? You don’t have with metronix. You get lifetime support.
The ADU-10e and ADU-11e have extremely low power consumption (2.5 W and 4.5 W).
Due to single board design, repair costs are fair. Skilled users can repair the system by themselves.
Executive Summary:
Instead of using over priced black box systems, regain control over your data and your system.
Speedy measurements at high quality, scientific data interpretation and open source software are the key to success.
Laptop
32 GB RAM and a 512 GB SSD are recommended.
Full HD (1920 x 1080) or more is recommended.
We differentiate between the following classes of laptops:
Military grade (e.g. Panasonic Toughbook), ruggedized
Industrial grade (e.g. Panasonic, Dell), semi ruggedized
Consumer grade, not ruggedized
Semi ruggedized laptops are recommended for field work.
Since the warranty of the laptop is issued by the vendor, please buy locally.
Old Systems and New Coils
Note 1
The ADU-07 (without “e”) is not supported. We have upgraded all ADU-07 to ADU-07e. A few users did not participate in the upgrade program.
Also ADU-07e with “GEODE” CPU are not supported. Since 2014 (#298) we use “IGEP” CPU which is much faster and supports AMT / MT measurement simultaneously.
So simply spoken: all ADU-07e (#298+) and ADU-08e are compatible with the new coils. Only very old systems are too slow to support AMT / MT measurement simultaneously. Firmware must be updated.
Note 2
The dedicated HF ADCs of the ADU-07e/ADU-08e are not designed for LF data. They decay below 1 Hz. So you can do AMT on the HF ADC and MT on the LF ADC (two jobs with different sampling rates). You can do AMT/MT down to 1 Hz in a single job, but below 1 Hz you will not be happy.
Note 3
You are lucky because the ADU-11e is sold at a very competitive price. Don’t fiddle around with old systems and new coils.
Note 4
MFS-07e can be replaced by MFS-12e in most cases. Even though the 07e performs slightly better at higher frequencies, the 12e compensates this by “multi-shots”.
Only if you go above 20 kHz you may want to use the 07e. … most MT users do not go above 20 kHz.
Final Note
With the ADU-11e & MFS-12e we started a complete new generation of systems and coils. To unleash the capabilities, you need both together. Traditionally metronix supports all combinations of old and new systems and coils. So your transition is smooth and gentle.